お久しぶりです、けんとうしの千葉です。
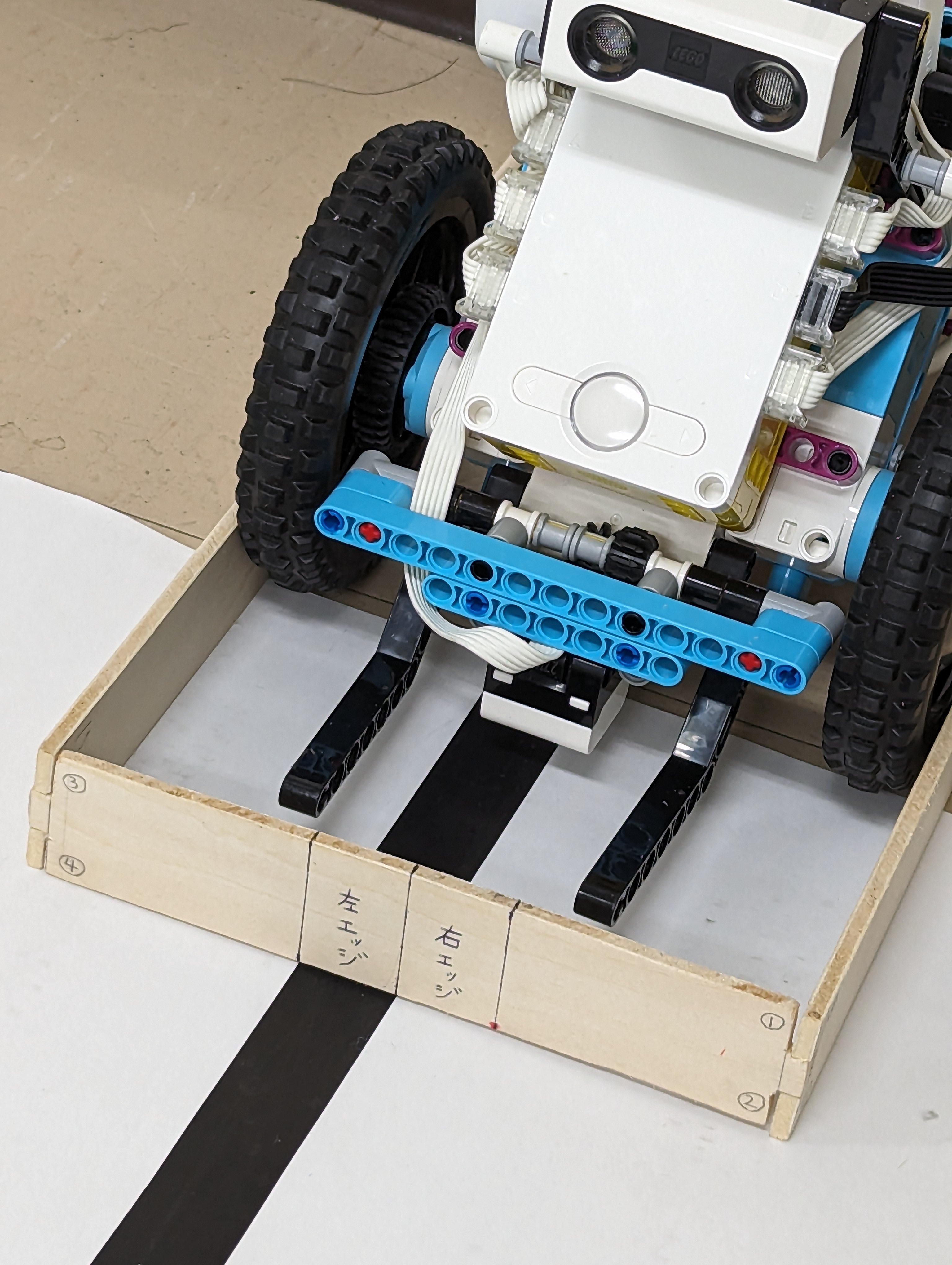
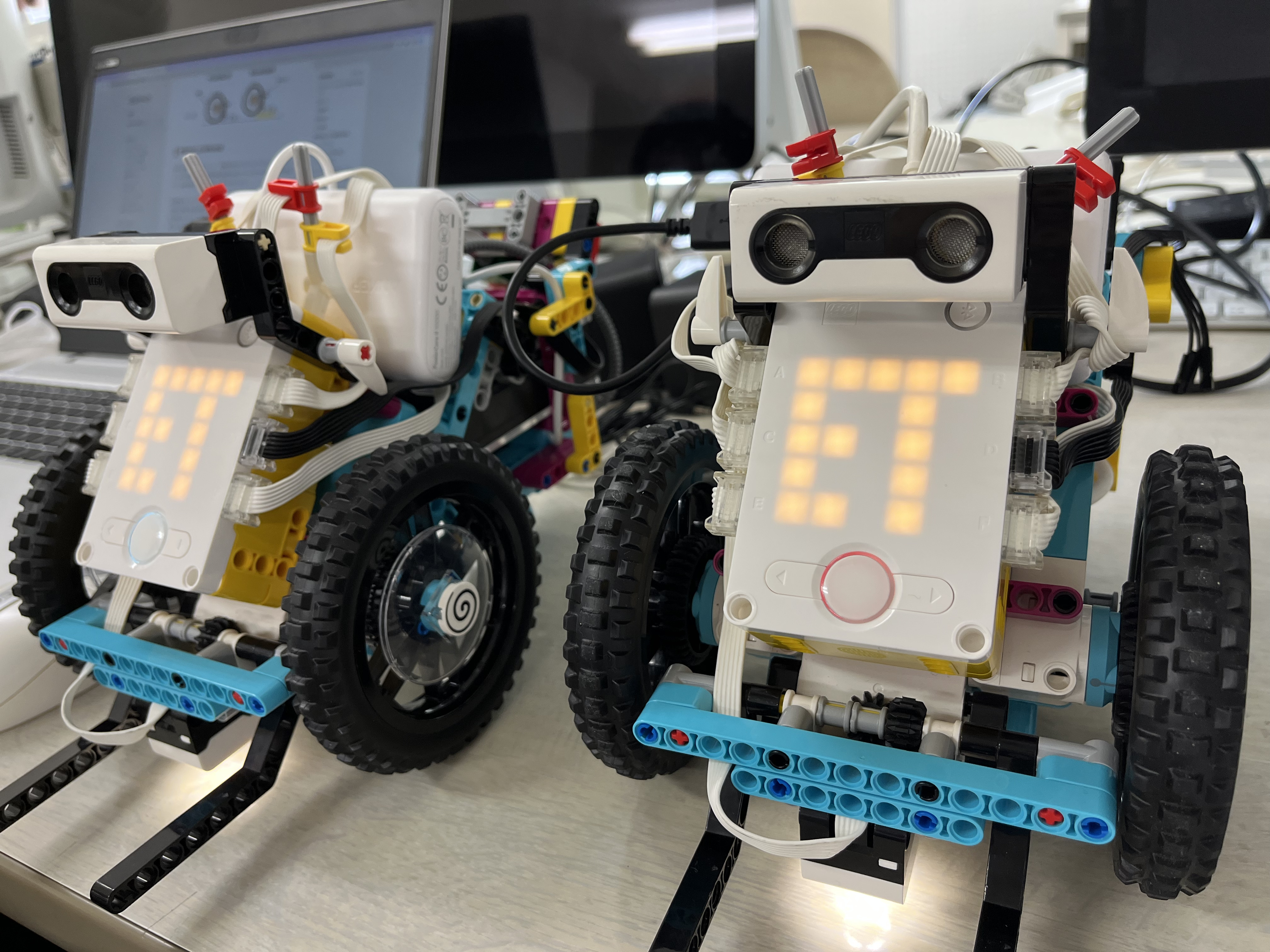
10月8日に行われたETロボコン地区大会について報告します。
結果は残念ながらどちらのチームも想定していた通りの動きができず、悔いの残るものとなりました。
ですが、奨励賞を受賞することができた他、チームとして一丸となって開発することができ、モデル図も納得のいくものができて貴重な経験をすることができました。
ETロボコンという大きなイベントが終わり残りの学生生活も短くなってきました。今ある時間を有意義に使い充実した学生生活を送りたいと思います。
最後になりますが、来年出場する後輩達は私たちの意思を継いで頑張ってください。
ありがとうございました。さようなら