みなさん、初めまして!
チームけんとうしの畠沢(はたざわ)です。
try catchチームとの交代でブログを書いていきたいと思っています~(ブログ自体を書くのが初めてなので文章の表現が拙いと思いますが…)投稿日が5月なのに最高気温が25°を超えるという熱い中、ロボコンに向けて頑張っています!!
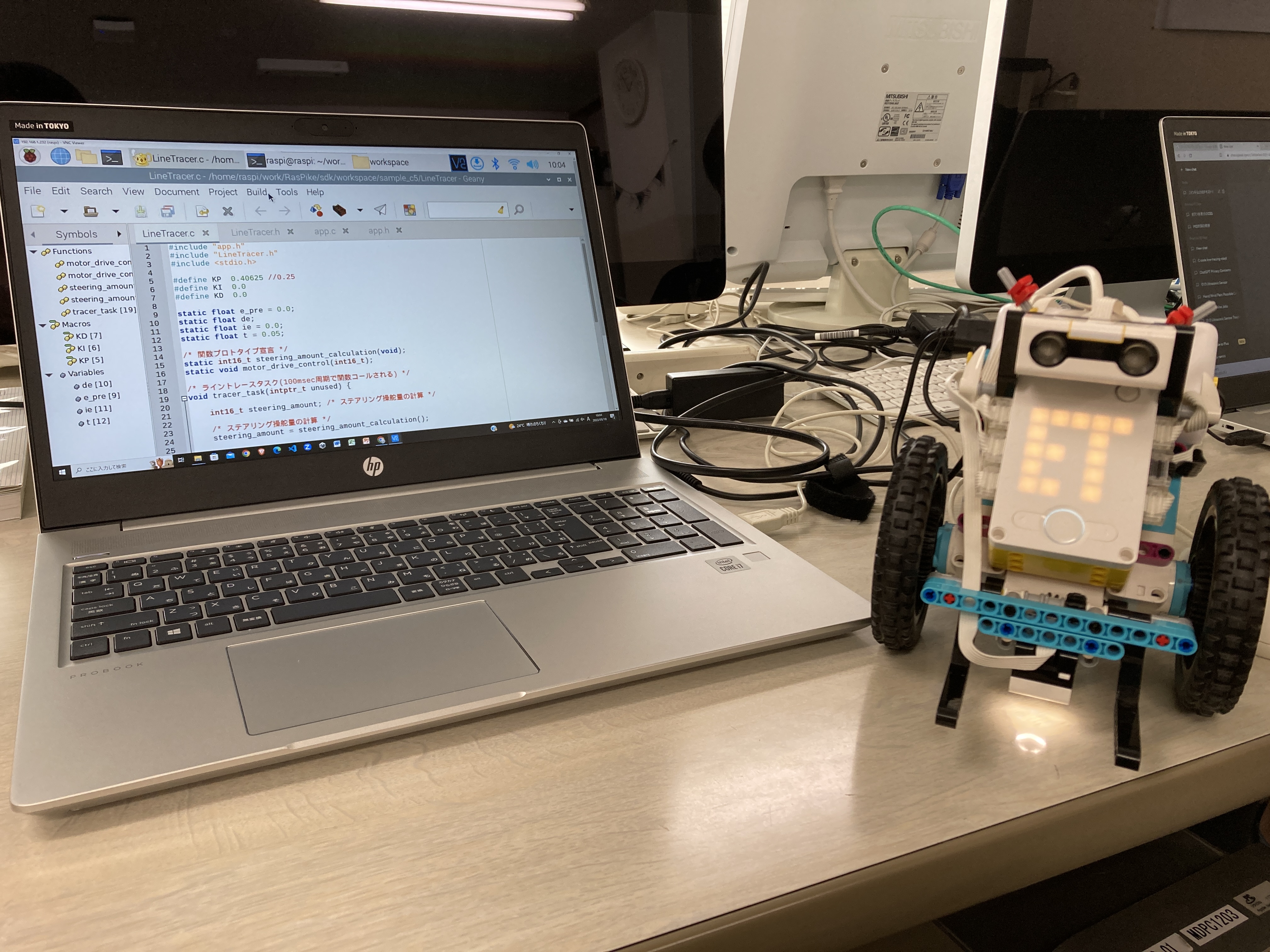
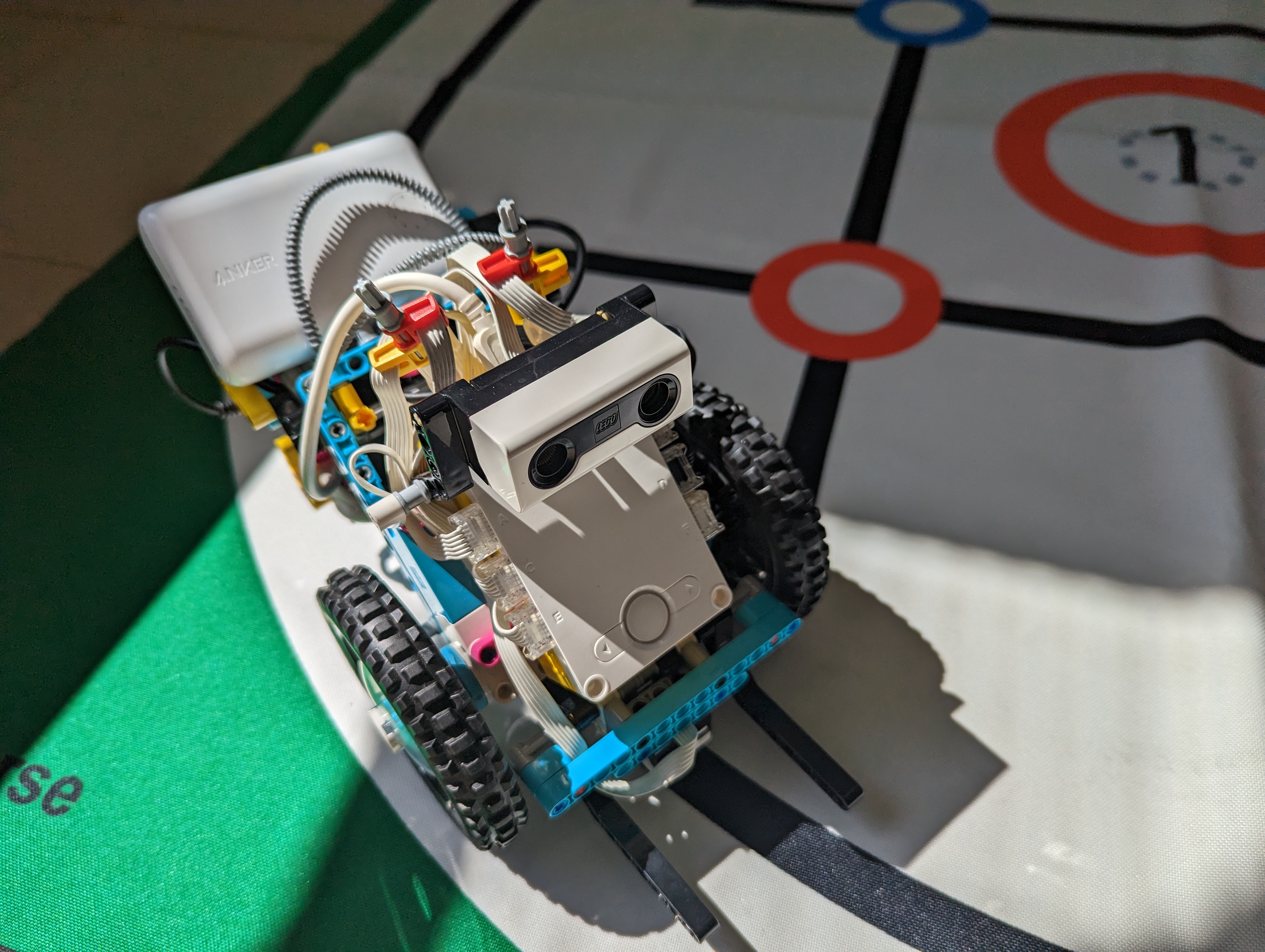
ロボコンの進捗なのですが、現在ライントレースに向けてのプログラムを調整中です。値の細かな調整などがうまくいかず試行錯誤の毎日ですが本番に向けてまあ、何とかなるようにがんばっています!
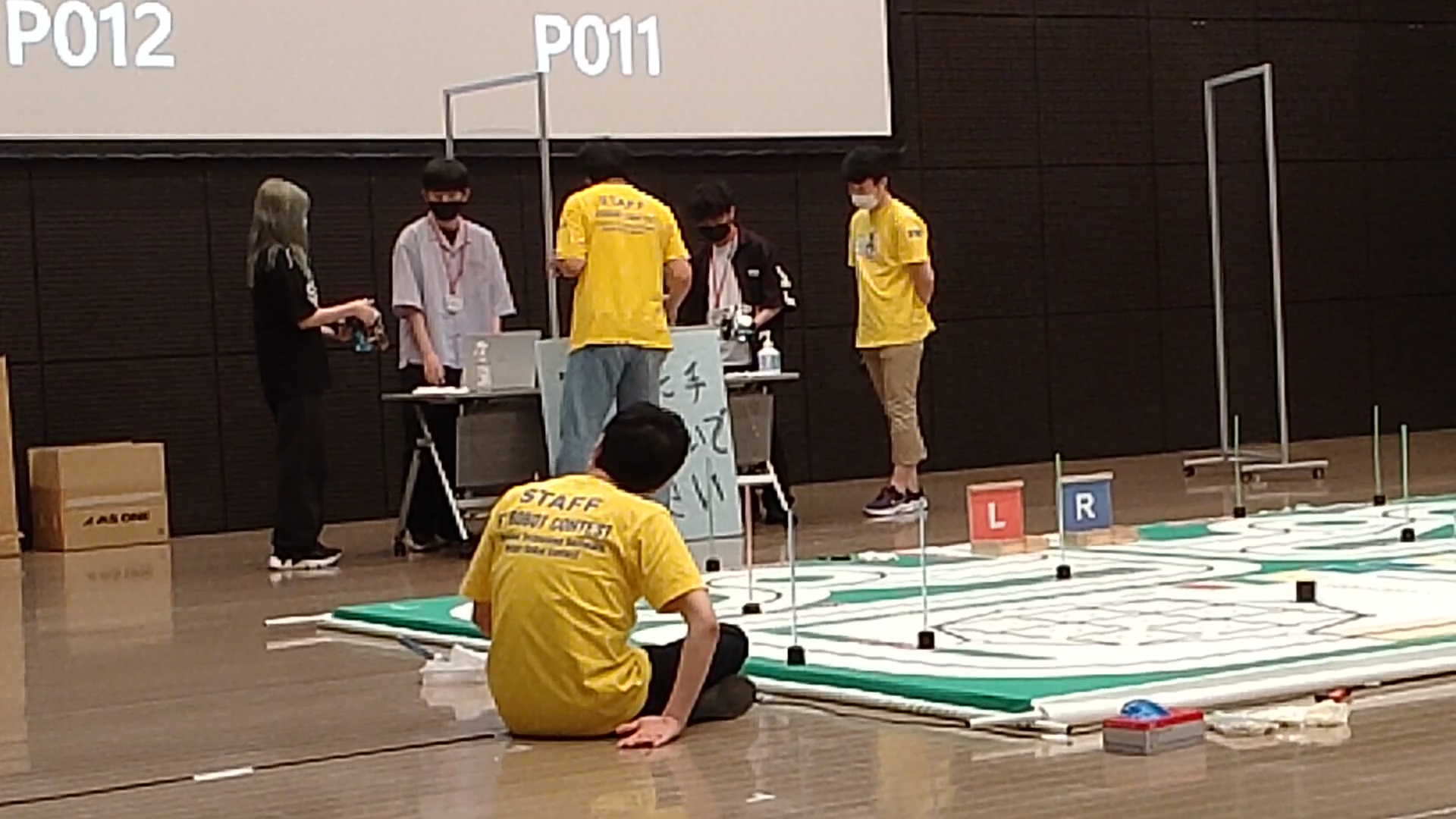
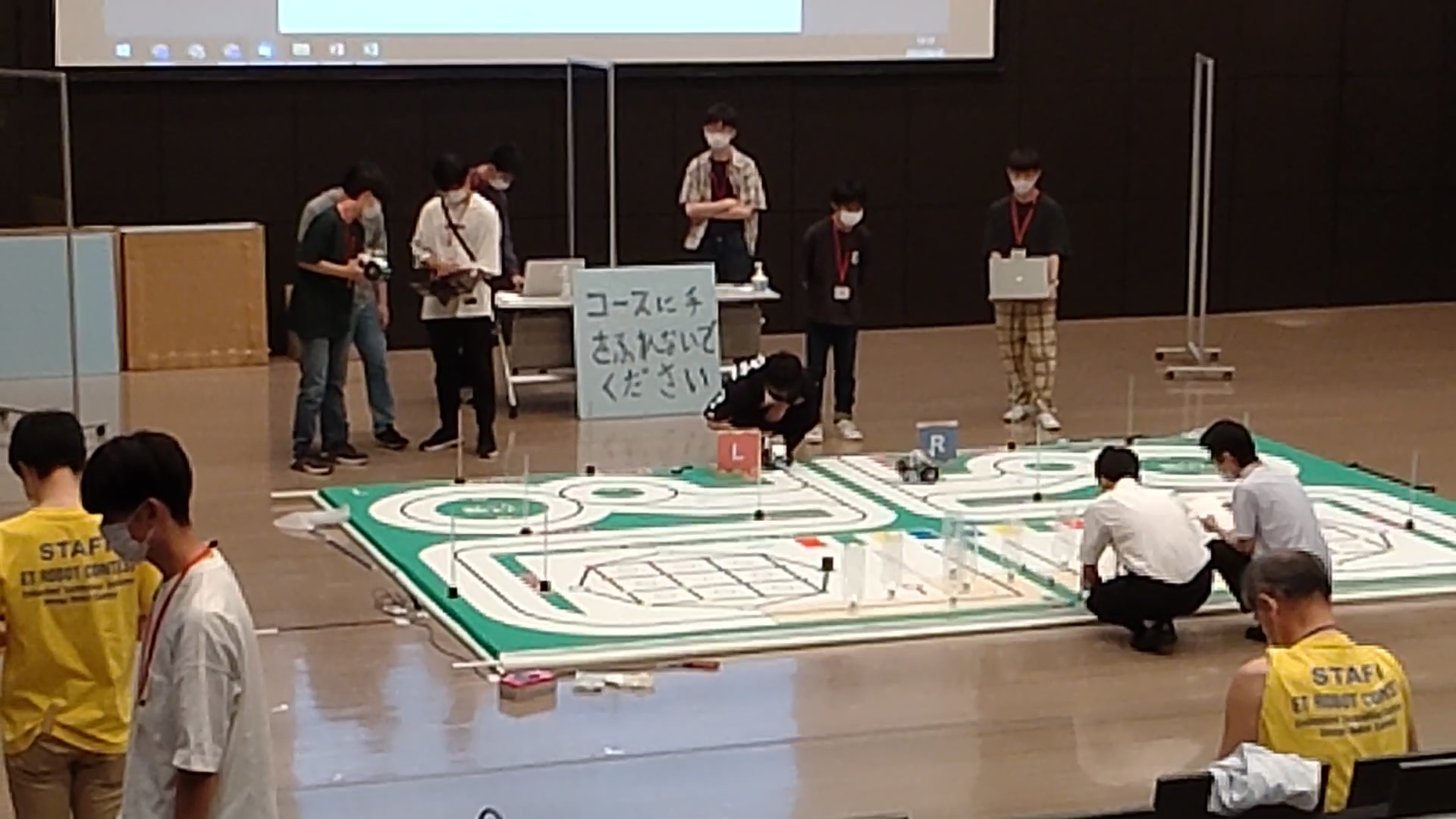
チームの最終目標としては、難所を越えてゴールし、あわよくば横浜で開催される「全国大会」への出場です!目標に向けてチームメンバーとともに頑張っていきますので、今後もよろしくお願いします!!