りゅーいち
こんにちは!

はやの
久しぶりだね
あつや
一気にいろいろ報告していきます(^^)/
わたる
まず、りゅーいち技術教育おつかれ~!
りゅーいち
づがれだ!!!
はやの
今回二回目だけど、どんなかんじだった?
りゅーいち
前回は基本的なことで、今回は超応用編だったね!前回のを踏まえて今回さらに詳しくって感じ!
こまち
なるほど~!ためになった?
りゅーいち
うん…ちょっと難しい部分もあるけどためになったよ!
わたる
まあ、これが一つ目の報告、『技術教育行ってきたよ~』でした!
はやの
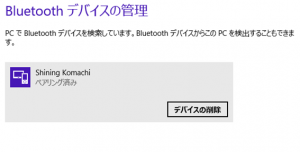
そして二つ目の報告は、『Shining Komachiがトレースした…!』だよ😉
あつや
ついに…!!!
りゅーいち
そう!ついに!!!!
わたる
はい。Shining Komachiがライントレースできるようになりました!
こまち
まだ、急カーブとかが少し危ういけどね!
あつや
ただ、一つ問題があってね…倒立振子がね…
りゅーいち
うん…倒立振子のプログラムも入っているはずなんだけど、なんかうまくいかないんだよね。あと少しなんだけど…
はやの
だから今は、補助輪みたいなの付いてるよね。
わたる
まあでも大きな進歩だよ!!!
こまち
そうだね!なんとか試走会にも間に合うんじゃない!?
わたる
そうそう。試走会があったんだ。
あつや
はい!これが最後の報告、『皆で試走会に行きます!』です。
りゅーいち
今月、7月28日に盛岡へ試走会に行ってきます!!!
こまち
この試走会には2年生の子たちも来るとか来ないとか…
わたる
なんだって!?
はやの
まあ、いつも通りに…
りゅーいち
今回はちゃんとゴールまでトレースして走れるかどうかの確認ができればいいかな!
あつや
あと会場の明るさとかの数値をとったりね!
わたる
頑張ろう!おー!!!✊
こまち
じゃあ、今回はここまで!次回もお楽しみに!!