初めまして、江藤です。
技術教育2に行ってきた吉田君との情報共有も終えましたので、次の段階へ進んでいきたいと思います。
現在は私はガントチャートを作成し、進捗状況を管理しながら他のメンバーの状況を確認しつつ、作業を進めています。
プログラミングチームは走行時に使うデータの取得、モデル図チームはプログラムチームと話し合いながらコースの分析を行い、足並みを揃えつつモデル図の作成にも取り掛かっていきます。
来週もよろしくお願いします!!

初めまして、江藤です。
技術教育2に行ってきた吉田君との情報共有も終えましたので、次の段階へ進んでいきたいと思います。
現在は私はガントチャートを作成し、進捗状況を管理しながら他のメンバーの状況を確認しつつ、作業を進めています。
プログラミングチームは走行時に使うデータの取得、モデル図チームはプログラムチームと話し合いながらコースの分析を行い、足並みを揃えつつモデル図の作成にも取り掛かっていきます。
来週もよろしくお願いします!!
初めまして吉田です。
技術教育1に行ってきた江藤と情報共有できました。
モデル図とプログラミング作業の足並みをそろえることが大切だと再確認することが出来ました。\(^^)/
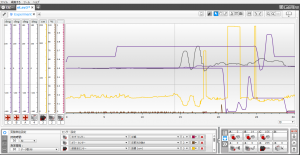
EV3の走行については、現在村松と私で、データをリアルタイムで取得するデータロギングをBluetoothで行う作業をしています。
私は、EV3を販売している公式サイトからダウンロードしたソフトウェアを使いデータロギングを試みてるのですがBluetoothがうまく接続できないのでいろいろ調べています。
こちら優先接続時のものです。
来週も頑張ります!(´◉◞౪◟◉)
みなさんお久しぶりです、ブログの更新に間が空いてしまいすみませんでした。
今は新しい走行体を二体購入して、組み立てて試走準備に取り掛かっています!
さっそく、私たちは2グループに分けてプログラミングチームとモデル図チームに分かれて各々作業することにしています。
プログラミングチーム:吉田・村松
モデル図チーム:須藤・坂本・江藤
モデル図は超のつく初心者でもあって、本格的に始動するのが本大会の技術教育セミナー5/18(土)を受講してきてからということにしてありますが、全員で去年の優秀なモデル図のすべてに目を通して各疑問点や技術教育セミナーへむけての質問事項の洗い出しもしています!
優秀、優良なモデルの共通点としてはなにかしら独自のデータを編み出しているところにあると思います。そうすることでモデル図の最後の項目の工夫点も書きやすくなることもあり、わたしたちから見ても見ごたえのあるものになっていると思います。
そういったこともあってプログラミングチームには、走行体の取りうるデータを掛け合わせた独自のデータを活用、作成してもらうことになると思います。
このデータの類を文字に起こすことによって、審査員の方々の好みにもよりますが、【一位を取るためのモデル図】より、【わかりやすい且つ見やすいモデル図】を目指して頑張っていきたいと思います。
次回の更新は技術教育が終わった来週のいずれかになると思いますので、今後ともよろしくお願いします!
みなさん、お久しぶりです(笑)
だいぶ時間が空いてしまい、申し訳ありませんでした!
応用二年の須藤です。
今回は、新ステージ発表に向けてチーム1とチーム2で校内試走会をしてみました。

結果は…
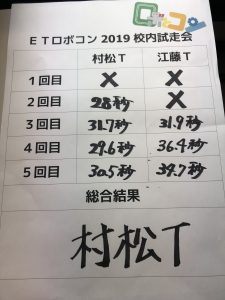
優勝は、チーム1(村松・須藤・吉田)になりました!
チーム2(坂本・江藤)も倒立すらままならない状況から完走できるまでになったので、とても大健闘になりました。
思ったより接戦になり、負けてしまうかひやひやしていましたが無事逃げきれてよかったです(笑)
さて、これからのことですが、5人で役割分担して取り組んでいきます!

↑今はこんな感じでロボットを走らせています!
来週は現在の深刻状況と役割分担を発表していきたいと思います!
次回もお楽しみに~!
みなさん、こんにちは。須藤です。
今回は、チーム2に進展があったので報告したいと思います!
チーム2代表:江藤
前回から、記述の見直しを行った結果、PID制御を入れた状態でコースの完走をすることができました。走行中の車体の安定という点はまだまだですが、この調子で進めていきたいです!
ロボコンのコース発表も近くなってきて、一同緊張しています(; ・`д・´)
また進展があり次第報告したいと思います!
ではまた!
みなさん、お久しぶりです。須藤です。
今回は、この前紹介した2グループの進捗状況を報告していきたいとおもいます!
チーム1(須藤・村松・吉田):PID制御を使って、30秒くらいで去年のコースを完走することができました。現在は距離計算をすることで直線コースは速度をあげ、カーブのときは速度を下げて安定させるよう調整しています。ルックアップゲートやシーソーはそのあとに手を付けていきたいと考えています。
チーム2(江藤・坂本):サンプルコードにPID制御をいれて、車体の安定とコースの完走を目指しています。チーム1よりちょっと遅れているので、追いつけるよう必死に頑張っています!
そろそろ今年度のETロボコンのコースの発表も近くなってきました。
どのようなギミックがきても対応できるように色々試してみたいと思います!
では今週はこの辺で、また来週もお楽しみに~!

初めまして、応用システム学科2年の須藤です。
さて、さっそくではありますが、今回のETロボコン2019に向けて本格的に取り掛かり始めました!
その中でも私たち、応用システム学科の5人は2チームに分かれて作業しています。
今日はそのメンバーを紹介していこうと思います!
チーム1 須藤 村松 吉田
チーム2 江藤 坂本
私自身ブログを書くことが初めてのことなので、少々緊張していますが、週一のペースで更新していきたいと思います。
短くなりましたが、これからは作業の様子や進捗具合を更新していきますので、よろしくお願いします!
今回の地区大会は目標であった、完走をする事ができませんでした。全体の作業を振り返っても情報共有がしっかりできていない所もあり、そういった積み重ねが今回の結果に繋がってしまったと思います。これらの反省を踏まえ今後はしっかりとコミュニケーションをとり作業に臨んでいこうと思いました。
目標の完走はできませんでした。
しかし、コミュニケーションの不足など反省点は分かったので現在取り組んでいるグループ作業や就職後はしっかりコミュニケーションを取ったり、スケジュール管理などをしっかりやっていきたいと思います。
やること全てが新しい事だったので、習得からして苦労しました。
それに加えて、スケジュールの管理や、グループ全体で作業を分担する事、そして何よりコミュニケーションを取る事が加わり、役割を全うすることは出来ませんでした。
しかし、この経験を活かして、今後行うグループでの作業では、コミュニケーションをはじめとしたグループでの連携を意識しようと考えました。
今回、良い結果を残すことは出来ませんでしたが、グループで作業することの難しさや、スケジュール管理の大切さなどを学ぶ事が出来ました。
特に、グループのメンバーとコミュニケーションを取りあっていく事が大切だと感じました。私はわからない事がたくさんあり、メンバーに任せっきりの部分もありました。なので、わからない事はそのままにせず、メンバーとコミュニケーションをとって解決していこうと思いました。

大会ぎりぎりになって焦りだしたのでもう少し余裕を持ってやればよかったと思います。後はコミュニケーションをしっかりとって、報告、連絡、相談は欠かさずやろうと思います。