こんにちは!!両角です!
先週はロボットの組み立てが完成し、仕様書等でき次第モデル図に取り掛かれそうですねー(^o^)/
シュミレーターに必要な環境構築も先週ブログを書いてくれた、山下君が頑張っています!
なので夏休みにはロボットも動かしつつ、モデル図に取り掛かれるように「スケジュール管理・チーム内の状況確認」をしっかりしていきたいと思います。
では来週の更新もお楽しみに―

こんにちは!!両角です!
先週はロボットの組み立てが完成し、仕様書等でき次第モデル図に取り掛かれそうですねー(^o^)/
シュミレーターに必要な環境構築も先週ブログを書いてくれた、山下君が頑張っています!
なので夏休みにはロボットも動かしつつ、モデル図に取り掛かれるように「スケジュール管理・チーム内の状況確認」をしっかりしていきたいと思います。
では来週の更新もお楽しみに―
はじめてブログを書かせていただく山下です。少し前の「最近の進捗状況」の写真に移りこんでた奴です。以後お見知りおきを。
ロボット本体の組み立て作業が終わりました!去年までは二輪だったのですが、今年は三輪で走る「HackEV」を使って出場することになりました。倒れないように安定させる倒立振子のプログラムを書かずに済むのがデカいですね。楽できるところは楽したいです。

かっこいいですね~~!重量感あってつよそう。
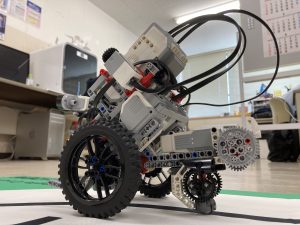
個人的にこのアングル気に入ってます。
もうちょっと長々と書きたい気持ちもあるのですが、ロボットのシミュレーションに必要なPCの環境構築作業が残っているので、今回はこの辺でおいとましようと思います。
ではまた。
みなさんお久しぶりです!!両角です(‘◇’)ゞ
新型コロナウイルスのため、久しぶりのブログ更新になります。
出場するためのチーム名を決めていなかったので、みんなで意見を出し合いチーム名を考えた結果、、、、
チーム名は「あすたりすく」に決まりました!!
記号「*」(アスタリスク)の線6本をメンバー6人に、中心の交点を目標と捉え、協力しながら同じ目標を成し遂げる!という意味を込めています
コロナの影響で、大会の日程に変更がありましたが、チームでの協力を大事にロボコンに向け頑張っていきたいと思います。
来週のブログもお楽しみに―ーー(^o^)/
みなさんこんにちは!!(-ω-)/
今日は校内で試走会を行いました。各チームごとにコースを走り、そのタイムを競いました。
結果はこんな感じです。↓↓
チームA:結果なし チームB:37.1(最高記録)
チームAは残念ながら、ロボットが思うように走ってくれませんでしたが、チームBは安定した走りで結果を残しました。
この結果から、それぞれのチームで良かった点、問題点をまとめました。このような点を改善していきながら、学科メンバー6人で役割分担し、励んでいきたいと思います。
みなさんこんにちは!!
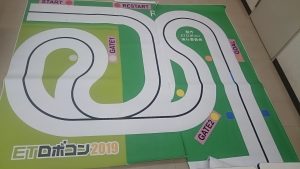
今日はETロボコンのコースが発表されました(゚Д゚)ノ
今年は去年とは違い、シーソーがなくなり、代わりに障害物をよけながら板の上を通過するという難所に変わりました。
さらに驚いたのは、走行体が変わったことです。これらのことから、難所やコース、走行体に合わせたプログラムを組んでいきたいです。
また、このブログにいいねボタンをつけました!!!ブログの下のほうにあるので、ぜひ押していただけると嬉しいです(*ノωノ)
では、また来週をお楽しみに~~~~~~!!
みなさんこんにちは!!!両角です(‘ω’)ノ
今日は最近の作業風景と進捗状況について書いていきます。
現在私たちは、ロボットがライントレースできるよう、プログラムの細かな部分を変更し、動作確認を繰り返し行っています。

上の画像では、ライントレースにPID制御を組み込み実際に走らせています(-ω-)

ちゃんとライントレースしました!!( ゚Д゚)/
ETロボコンのコース発表も近くなってきたので、どのようなコースでも走らせられるように頑張っていきたいと思います。
では、また来週をおたのしみに!!!!
初めまして!!応用システム学科2年 両角です。
ここでは、ETロボコン2020に向けての日々の作業風景や、進捗状況などを主に書いていきたいと思います(‘◇’)ゞ
さて、早速ですが、現在は応用システム学科のメンバー内で2つのチームに分かれ各自作業を行っています。
それぞれのチームのメンバーは………
チームA 木村 中嶋 両角
チームB 越田 山下 斎藤

こんな感じです( `ー´)ノ
このメンバーでこれから頑張っていきたいと思います!!
ちなみに使用するロボットはこんな感じです!! → → →
皆さんお久しぶりです、須藤です。
約1年前から五人で活動し、ついに9/21(土)ETロボコン本番を迎えることができました。
早速、今回の走行結果になりますがLコースリタイア、Rコースゴール後難所前で転倒しました。
順位が、地区では19チーム中10位、全国では284チーム中97位という成績でした。
モデル図はまだ結果が届いていないのですが、自分が担当した工夫点は褒められましたが、シーケンス図とクラス図の関連性がなく内容が一貫していないなど、工夫点含む改善の余地はまだまだありました。
結果からみると確かに悔しいことが大きかったですが、その反面チーム全員でここまで諦めずに頑張ってこれたことがとても嬉しく思います。
最後に、チームの一人ひとりから反省点を話してもらいます。
村松:スタートからゴールまでの走行を担当しましたが、PID制御や区間分け等様々な機能の追加にも挑戦することができたました。ETロボコンでの経験をこれから働く際に活かしていきたいと思います。
坂本:私はモデル図を担当しましたが、シーケンス図やアクティビティ図などを作成し、モデル図に関する知識を高めることができました。反省点は、クラス図とシーケンス図の連携がうまくできていなかったので、そこをしっかりと意識して作成しなければならないと感じました。ETロボコンでの経験をこれから働く際に活かしていきたいと思います。
須藤:私はモデル図を担当しましたが、主に工夫点を作成しました。工夫点自体は評価がよかったのですが、全体としては出来がまだまだで一貫性がなかったとのことだったので、来年度参加するの人たちには、自分たちの失敗を受け継いで良い評価をもらえるように頑張ってほしいです。
吉田:ルックアップゲートを担当しましたが、組み込み知識不足から本番の布コースと校内の紙のコースの違いの影響に対応できるプログラムにできませんでしたがゲートをくぐる形は出来たので良かったです。ETロボコンでの経験を役立てたいと思います。
義平:モデル図の設計を担当しましたが、モデル図の内容に矛盾があり、審査の評価としては良くないものでした。反省点としては、それぞれが担当しているUML図間の連携が上手くいかなかったことです。こういった反省を踏まえ、これからの業務においてもメンバー間での連携に気を配り、目標達成のために今回の経験を役立てたいと思います。
初めまして、坂本です。
明日の地区大会に向けて最終確認をし、本番でクリアしなければならない問題点などを改善し、作業に取り組んでいます。
現在、モデル図チームはモデル図の完成させ、提出をしたので難所であるシーソーのチャレンジをしています。シーソーはクリアするのが難しく成功率は低いです・・・。
プログラミングチームはルックアップゲートをクリアするために試行錯誤し、コースを安定して走行できるように値などの細かな調整を行っております。そしてルックアップゲートは試走の段階では、かなり高い確率で成功することができ、大幅なタイムの短縮が期待できます!
明日は頑張るぞい!!
初めまして、村松です。
新コースの正式なデータが配布されたので、改めてコースを印刷しました。若干色が違う部分がありますが、走行には影響しないので問題ないはず。
モデル図チームは機能モデルの作成に取り掛かり、プログラミングチームは、走行全体の見直しと難所の一つであるルックアップゲートでの制御のプログラミングをしています。
スタートからゴールまでの走行だけでも、スタートの安定や区間毎のPID制御の調整等、まだまだやることがあり時間が足りないです。
試走会まで残り約1か月、スケジュールはカツカツですが、スタートからゴールまでの完走とルックアップゲートの攻略を目指して頑張りたいと思います!
次回もよろしくお願いします。