こんにちはー両角です。
先週はシュミレーション環境の構築も終わったので、いよいよ設計図に取り掛かっていきます!!!

どうもどうも、山下です。早くも2回目の投稿となります。
先日ようやくシミュレーション環境の構築作業を終えました。前に書いた記事時点では用意しなければならないものがバラバラで、何からどうすればいいのかわからず、作業が停滞していました・・・ 続きを読む シミュレーション環境構築完了!PC上で走るロボット
こんにちは!!両角です!
先週はロボットの組み立てが完成し、仕様書等でき次第モデル図に取り掛かれそうですねー(^o^)/
シュミレーターに必要な環境構築も先週ブログを書いてくれた、山下君が頑張っています!
なので夏休みにはロボットも動かしつつ、モデル図に取り掛かれるように「スケジュール管理・チーム内の状況確認」をしっかりしていきたいと思います。
では来週の更新もお楽しみに―
はじめてブログを書かせていただく山下です。少し前の「最近の進捗状況」の写真に移りこんでた奴です。以後お見知りおきを。
ロボット本体の組み立て作業が終わりました!去年までは二輪だったのですが、今年は三輪で走る「HackEV」を使って出場することになりました。倒れないように安定させる倒立振子のプログラムを書かずに済むのがデカいですね。楽できるところは楽したいです。

かっこいいですね~~!重量感あってつよそう。
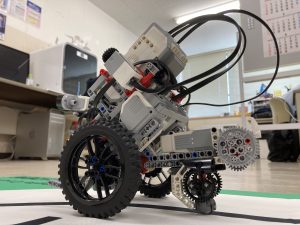
個人的にこのアングル気に入ってます。
もうちょっと長々と書きたい気持ちもあるのですが、ロボットのシミュレーションに必要なPCの環境構築作業が残っているので、今回はこの辺でおいとましようと思います。
ではまた。
みなさんお久しぶりです!!両角です(‘◇’)ゞ
新型コロナウイルスのため、久しぶりのブログ更新になります。
出場するためのチーム名を決めていなかったので、みんなで意見を出し合いチーム名を考えた結果、、、、
チーム名は「あすたりすく」に決まりました!!
記号「*」(アスタリスク)の線6本をメンバー6人に、中心の交点を目標と捉え、協力しながら同じ目標を成し遂げる!という意味を込めています
コロナの影響で、大会の日程に変更がありましたが、チームでの協力を大事にロボコンに向け頑張っていきたいと思います。
来週のブログもお楽しみに―ーー(^o^)/
みなさんこんにちは!!(-ω-)/
今日は校内で試走会を行いました。各チームごとにコースを走り、そのタイムを競いました。
結果はこんな感じです。↓↓
チームA:結果なし チームB:37.1(最高記録)
チームAは残念ながら、ロボットが思うように走ってくれませんでしたが、チームBは安定した走りで結果を残しました。
この結果から、それぞれのチームで良かった点、問題点をまとめました。このような点を改善していきながら、学科メンバー6人で役割分担し、励んでいきたいと思います。
みなさんこんにちは!!
今日はETロボコンのコースが発表されました(゚Д゚)ノ
今年は去年とは違い、シーソーがなくなり、代わりに障害物をよけながら板の上を通過するという難所に変わりました。
さらに驚いたのは、走行体が変わったことです。これらのことから、難所やコース、走行体に合わせたプログラムを組んでいきたいです。
また、このブログにいいねボタンをつけました!!!ブログの下のほうにあるので、ぜひ押していただけると嬉しいです(*ノωノ)
では、また来週をお楽しみに~~~~~~!!
みなさんこんにちは!!!両角です(‘ω’)ノ
今日は最近の作業風景と進捗状況について書いていきます。
現在私たちは、ロボットがライントレースできるよう、プログラムの細かな部分を変更し、動作確認を繰り返し行っています。

上の画像では、ライントレースにPID制御を組み込み実際に走らせています(-ω-)

ちゃんとライントレースしました!!( ゚Д゚)/
ETロボコンのコース発表も近くなってきたので、どのようなコースでも走らせられるように頑張っていきたいと思います。
では、また来週をおたのしみに!!!!
初めまして!!応用システム学科2年 両角です。
ここでは、ETロボコン2020に向けての日々の作業風景や、進捗状況などを主に書いていきたいと思います(‘◇’)ゞ
さて、早速ですが、現在は応用システム学科のメンバー内で2つのチームに分かれ各自作業を行っています。
それぞれのチームのメンバーは………
チームA 木村 中嶋 両角
チームB 越田 山下 斎藤

こんな感じです( `ー´)ノ
このメンバーでこれから頑張っていきたいと思います!!
ちなみに使用するロボットはこんな感じです!! → → →