
はじめてブログを書かせていただく山下です。少し前の「最近の進捗状況」の写真に移りこんでた奴です。以後お見知りおきを。
ロボット本体の組み立て作業が終わりました!去年までは二輪だったのですが、今年は三輪で走る「HackEV」を使って出場することになりました。倒れないように安定させる倒立振子のプログラムを書かずに済むのがデカいですね。楽できるところは楽したいです。

かっこいいですね~~!重量感あってつよそう。
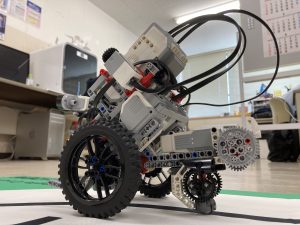
個人的にこのアングル気に入ってます。
もうちょっと長々と書きたい気持ちもあるのですが、ロボットのシミュレーションに必要なPCの環境構築作業が残っているので、今回はこの辺でおいとましようと思います。
ではまた。